રોબોટ વેલ્ડીંગની વેલ્ડીંગ અસર ઘણા પાસાઓથી પ્રભાવિત થાય છે. ઘણા ગ્રાહકો વેલ્ડીંગ રોબોટ્સનો ઉપયોગ કરવામાં નિપુણતા મેળવતા પહેલા કેટલીક સમસ્યાઓનો સામનો કરશે. મૂળભૂત રીતે, આ સમસ્યાઓ અયોગ્ય કામગીરી અથવા અયોગ્ય રોબોટ સેટિંગ્સને કારણે થાય છે, અને તે યોગ્ય ગોઠવણો દ્વારા ઉકેલી શકાય છે. આગળ, સંપાદક તમને યુન્હુઆ વેલ્ડીંગ રોબોટ્સના ઉપયોગમાં ઘણીવાર થતી કેટલીક સમસ્યાઓ અને સંબંધિત ઉકેલોનો સ્ટોક લેવા માટે લઈ જશે.
1. વેલ્ડીંગ દરમિયાન અસફળ ચાપ શરૂ થવો
૧. ચાપ હજુ શરૂ થયો નથી.
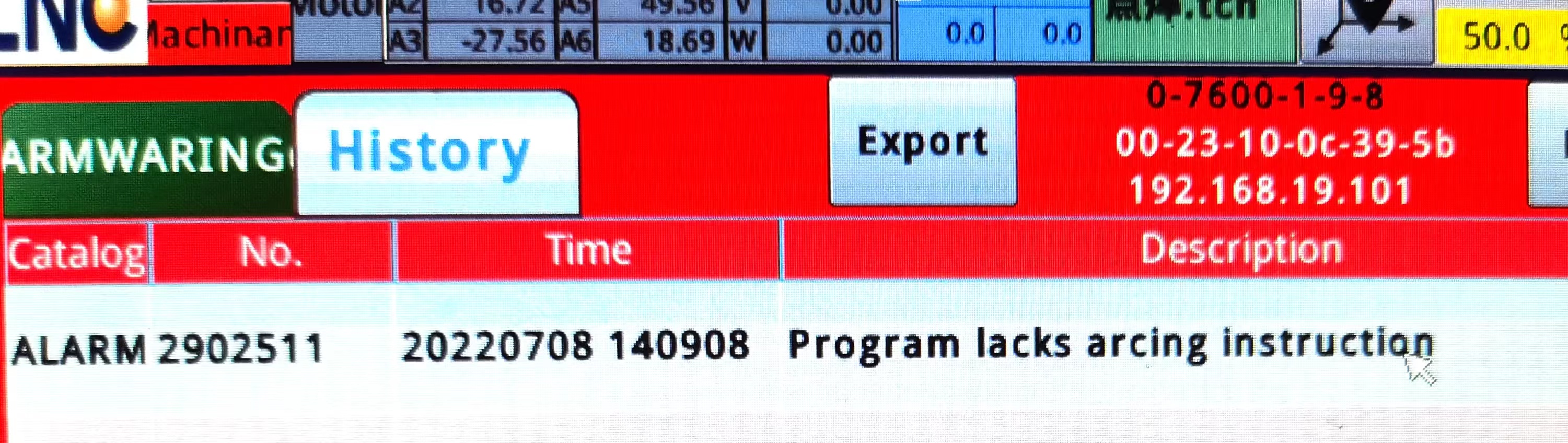
કારણ: સંપાદિત પ્રોગ્રામમાં આર્ક એન્ડિંગ કમાન્ડ એક્ઝિક્યુટ કરતા પહેલા કોઈ અનુરૂપ આર્ક સ્ટાર્ટિંગ કમાન્ડ નથી.
પ્રક્રિયા પદ્ધતિ: તપાસો કે એક વધુ આર્ક એન્ડિંગ કમાન્ડ ઉમેરવો કે એક ઓછો આર્ક સ્ટાર્ટિંગ કમાન્ડ ઉમેરવો
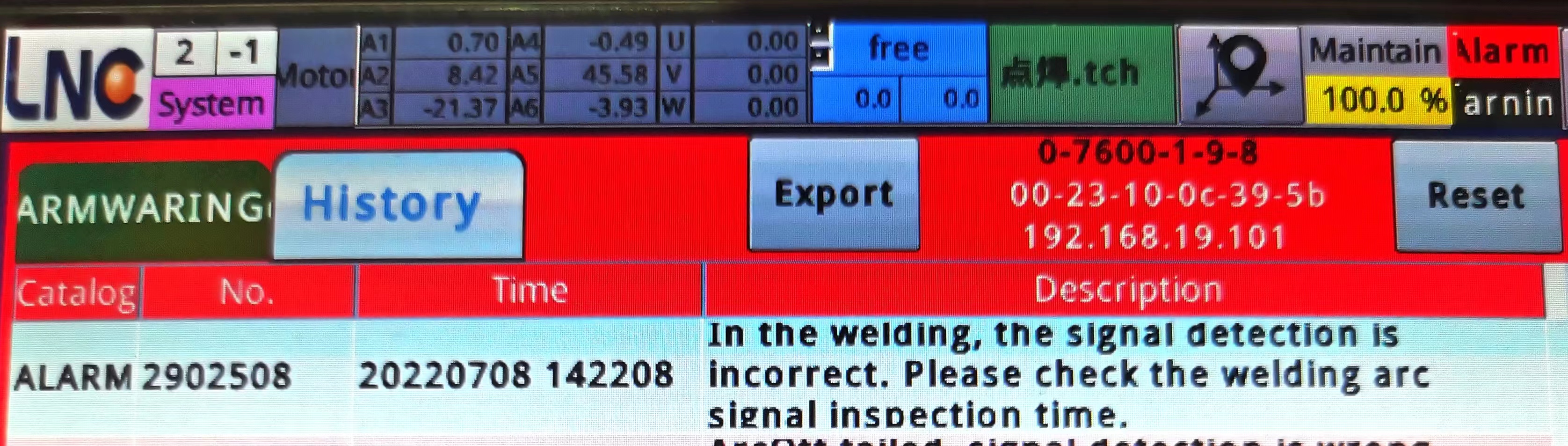
2. ચાપ શરૂ કરવામાં નિષ્ફળ, સિગ્નલ શોધ ખોટી છે
અભિગમ:
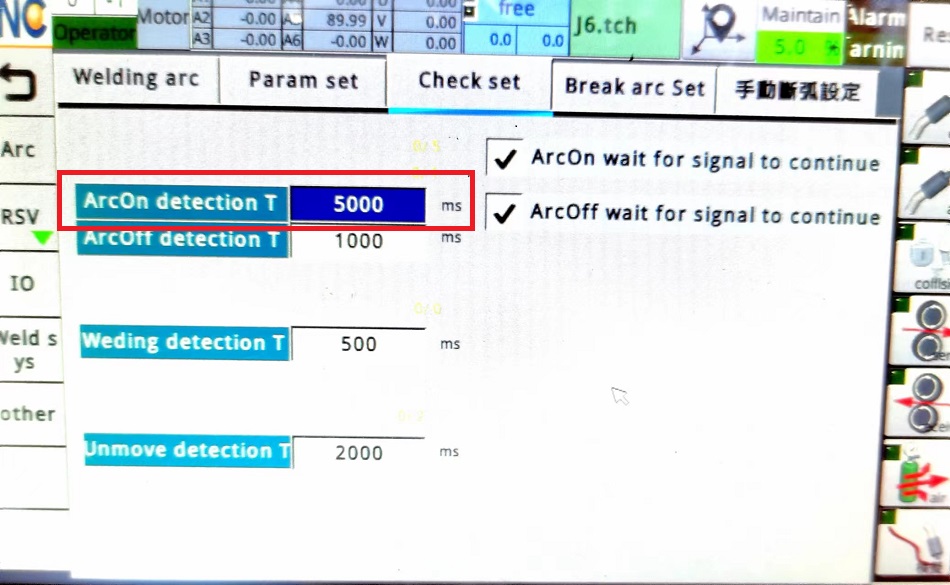
૧) પેરામીટર પેજ પર વેલ્ડીંગ વિક્ષેપ સમય સેટિંગ તપાસો. સામાન્ય રીતે, સમય 5000ms પર સેટ કરવો યોગ્ય છે.
૨) તપાસો કે વેલ્ડીંગ મશીન સિગ્નલ સફળતાપૂર્વક સિસ્ટમમાં ટ્રાન્સમિટ થયું છે કે નહીં
૩) તપાસો કે વર્કપીસ ગ્રાઉન્ડેડ છે કે નહીં
3. આર્ક ફ્રાઇડ વાયર
કારણ:
૧) વર્તમાન અને વોલ્ટેજનો મેળ ખાતો નથી
પ્રક્રિયા પદ્ધતિ: આપણે વર્કપીસ અને વેલ્ડીંગ મશીનની વાસ્તવિક જાડાઈ અનુસાર યોગ્ય વર્તમાન અને વોલ્ટેજ સેટ કરવાની જરૂર છે.
૨) વેલ્ડીંગ વાયરની લંબાઈ ખૂબ લાંબી છે
સારવાર પદ્ધતિ: સામાન્ય રીતે, વેલ્ડીંગ વાયરની લંબાઈ વેલ્ડીંગ વાયરના વ્યાસ કરતા 10 થી 15 ગણી હોય છે, અને વેલ્ડીંગ વાયરની યોગ્ય લંબાઈ વેલ્ડીંગ વાયરના વ્યાસ અનુસાર પસંદ કરવામાં આવે છે.

ખૂબ ઓછો પ્રવાહ અસમાન વેલ્ડ તરફ દોરી જાય છે

સામાન્ય પ્રવાહ અને વોલ્ટેજ, સુંદર અને મજબૂત વેલ્ડ

વેલ્ડીંગ ટોર્ચનો છેડો વાયરને બોલ કરશે

સામાન્ય વેલ્ડીંગ પછી વેલ્ડીંગ ટોર્ચ એન્ડ વાયર સારી સ્થિતિમાં છે.
4. આર્કિંગ પછી ઓટોમેટિક આર્ક ઓલવવાની ઘટના થાય છે
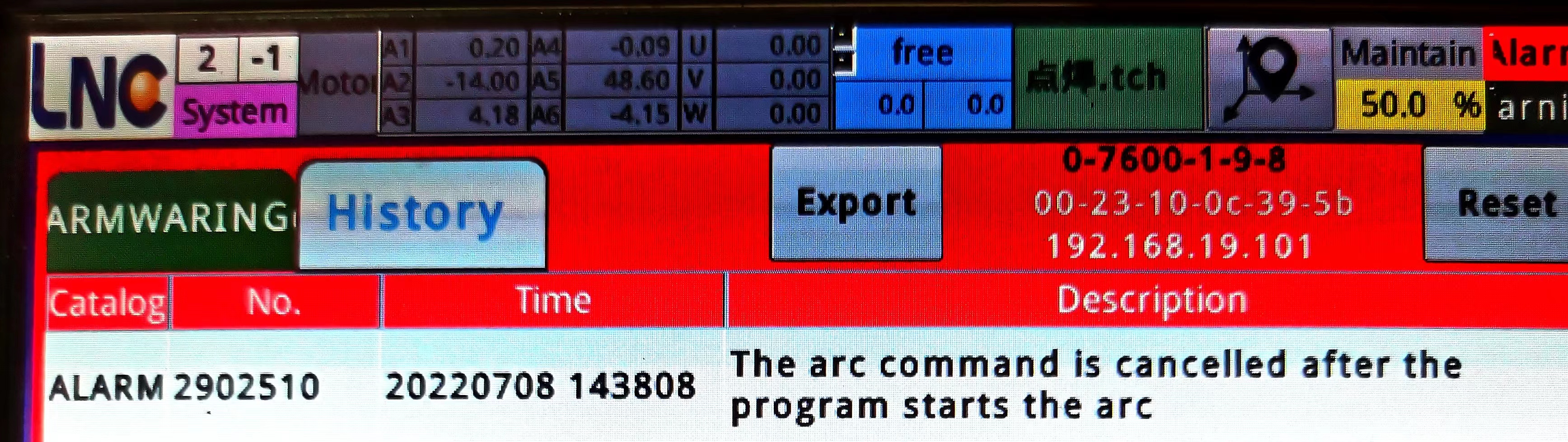
ઉકેલ: પેરામીટર સમય ખસેડવામાં સમય સેટિંગમાં કોઈ સમસ્યા છે કે કેમ તે તપાસો, અને વેલ્ડીંગ ટોર્ચ ખસેડાઈ છે કે કેમ તે તપાસો.
2. વેલ્ડીંગ દરમિયાન આર્ક બ્રેક થાય છે
કારણ:
1. જો વેલ્ડીંગ વાયર વર્કપીસને સ્પર્શે નહીં, તો આર્ક બ્રેકિંગ એલાર્મ ટ્રિગર થશે.
સારવાર પદ્ધતિ: વેલ્ડીંગ વાયર અને વર્કપીસની સ્થિતિ ફરીથી ગોઠવો, જેથી વેલ્ડીંગ પ્રક્રિયા દરમિયાન વેલ્ડીંગ વાયર વર્કપીસ સાથે સંપૂર્ણપણે સંપર્કમાં રહે. (પરંતુ તે વર્કપીસની ખૂબ નજીક ન હોવું જોઈએ, તે વર્કપીસ દ્વારા વેલ્ડીંગ તરફ દોરી શકે છે)
2. ગેરવાજબી વેલ્ડીંગ પાથને કારણે અથડામણને કારણે બંદૂકનું માથું આપમેળે ઉપર આવે છે.
ઉકેલ: વેલ્ડીંગ પાથ રીસેટ કરો
૩. વેલ્ડીંગ મશીનના પોઝિટિવ અને નેગેટિવ વાયર નબળા સંપર્કમાં છે.
સારવાર પદ્ધતિ: સકારાત્મક અને નકારાત્મક વાયરની વાયરિંગ સ્થિતિ તપાસો
3. વેલ્ડીંગ પછી આર્ક એન્ડિંગ નિષ્ફળ જવાના કારણો
1. આર્ક નિષ્ફળતા, સિગ્નલ શોધ ભૂલ
કારણ: વેલ્ડીંગ મશીનને રોબોટ તરફથી સિગ્નલ મળ્યો ન હતો, જેના કારણે રોબોટ ચાપ બંધ કરવામાં નિષ્ફળ ગયો.
અભિગમ:
(1) સેટિંગ પરિમાણો વાજબી છે કે નહીં તે તપાસો
(2) IO સિગ્નલ તપાસો, અને તપાસો કે શું સમાપ્તિ બિંદુ I નો સિગ્નલ અસામાન્ય છે. જો I પોઇન્ટ સિગ્નલ ચાલુ દેખાતો રહે છે.
(૩) તપાસો કે લાઇનમાં શોર્ટ સર્કિટ છે કે નહીં અને ગ્રાઉન્ડ વાયર અસામાન્ય રીતે જોડાયેલ છે કે નહીં.
2. આર્ક સ્ટ્રાઇક પછી કોઈ આર્ક સ્ટોપ કમાન્ડ સેટ નથી.

કારણ: જ્યારે આ એલાર્મ ટીચ પેન્ડન્ટ પર વાગે છે, ત્યારે તપાસો કે તમે આર્ક એન્ડિંગ કમાન્ડ ઉમેરવાનું ભૂલી ગયા છો કે નહીં.
પ્રોસેસિંગ પદ્ધતિ: પ્રોગ્રામમાં આર્ક સ્ટાર્ટિંગ કમાન્ડ પછી આર્ક એન્ડિંગ કમાન્ડ ઉમેરો.
આ મુદ્દો મુખ્યત્વે વેલ્ડીંગ પ્રક્રિયા દરમિયાન યુન્હુઆ વેલ્ડીંગ રોબોટની ચાપ-શરૂ, ચાપ-ભંગ અને ચાપ-અંત સંબંધિત સમસ્યાઓનો પરિચય આપે છે. જો વપરાશકર્તાઓ ઉપયોગ દરમિયાન આવી સમસ્યાઓનો સામનો કરે છે, તો તેઓ ઉકેલોનો સંદર્ભ લઈ શકે છે. જો તે ઉકેલી શકાતી નથી, તો કૃપા કરીને સમયસર યુન્હુઆ ટેકનિશિયનની મદદ લો.
જો તમે યુન્હુઆ રોબોટની વધુ સામાન્ય સમસ્યાઓ અને ઉકેલો જાણવા માંગતા હો, તો કૃપા કરીને યુન્હુઆ રોબોટના સત્તાવાર એકાઉન્ટ પર ધ્યાન આપો.
યુન્હુઆ વેલ્ડીંગ રોબોટ એક ઓટોમેટિક રોબોટ છે જે ગેસ શિલ્ડેડ વેલ્ડીંગ, આર્ગોન આર્ક વેલ્ડીંગ, પ્લાઝ્મા કટીંગ અને લેસર વેલ્ડીંગ જેવા મલ્ટિ-ફંક્શનલ વેલ્ડીંગને એકીકૃત કરે છે. તેમાં ઉચ્ચ લવચીકતા, મજબૂત અનુકૂલનક્ષમતા, કાર્યક્ષમ વેલ્ડીંગ કાર્યક્ષમતા અને સ્થિર વેલ્ડીંગ ગુણવત્તા છે, અને તેનો વિવિધ ક્ષેત્રોમાં વ્યાપકપણે ઉપયોગ થઈ શકે છે. જેમ કે મશીનરી ઉત્પાદન, ઓટોમોબાઈલ ઉત્પાદન, ચોકસાઇ ઇલેક્ટ્રોનિક્સ અને કોલસા ખાણકામ અને અન્ય ક્ષેત્રો.
પોસ્ટ સમય: જુલાઈ-૧૫-૨૦૨૨



